LZ-Pro V2 工业级灵巧手
高精度 · 高灵巧 · 仿生机器人末端执行器

LZ-Pro V2 是灵掌机器人推出的机器人灵巧手产品,结合了先进的力感反馈与高度灵巧的运动能力,专为精密工业组装、复杂物件抓取以及前沿科研实验设计。
核心亮点
- 极致力觉感知:末端集成 13 个高分辨率压力传感器,实时监控每一根手指的抓取力度。
- 仿生结构设计:拥有 11 个自由度(6 主动,5 从动),外形与运动逻辑完美模拟人手。
- 工业级可靠性:整机采用 6061-T6 铝合金与 TC4 钛合金打造,适应严苛的工业作业环境。
- 高灵活性驱动:采用先进的腱绳驱动 (Tendon-Driven) 技术,实现紧凑空间内的高效动力传输。
IMPORTANT
通信协议支持:LZ-Pro V2 支持标准 Modbus RTU 协议,可便捷集成至 PLC 及工业上位机系统。查看详细协议文档
技术规格
| 项目 | 参数规格 |
|---|---|
| 自由度 (DOF) | 11 (6 主动 / 5 从动) |
| 驱动类型 | 腱绳驱动 |
| 手指数量 | 5 指仿生结构 |
| 最大捏合力量 | 50N |
| 传感器类型 | 13x 压力传感器 |
| 重复定位精度 | ±0.1 mm |
| 通信协议 | RS485 / EtherCAT / CANOpen |
| 工作电压 | 48V (Max 60V) |
| 材质 | 6061-T6 铝合金、TC4 钛合金 |
| 额定载荷 | 5 kg |
技术特性与软件支持
灵巧运动控制
LZ-Pro V2 采用 Tendon-Driven (腱绳驱动) 技术,使得掌部结构极其紧凑,同时拥有极高的空间透明度。这种设计允许手指完成极其细腻的指尖交互动作,如旋转微小零件或抓取易碎物体。
完善的软件生态
- C SDK:提供低延迟底层驱动接口,方便开发者进行二次开发。
- ROS/ROS2 支持:提供完整的 ROS/ROS2 驱动包、URDF 模型及仿真环境,助力快速集成到各类科研平台。
控制架构
维护与保养
为确保 LZ-Pro V2 长期稳定运行,建议执行以下周期性维护:
| 维护项目 | 频率 | 操作项 |
|---|---|---|
| 日常清洁 | 每天 | 使用无水乙醇清洁指尖传感器表面,确保感知精度。 |
| 线缆检查 | 每周 | 检查航空插头及连接线是否有磨损或松动。 |
| 深度检查 | 每 30 万次循环 | 检查腱绳张力及传动机构状态,必要时进行调整。 |
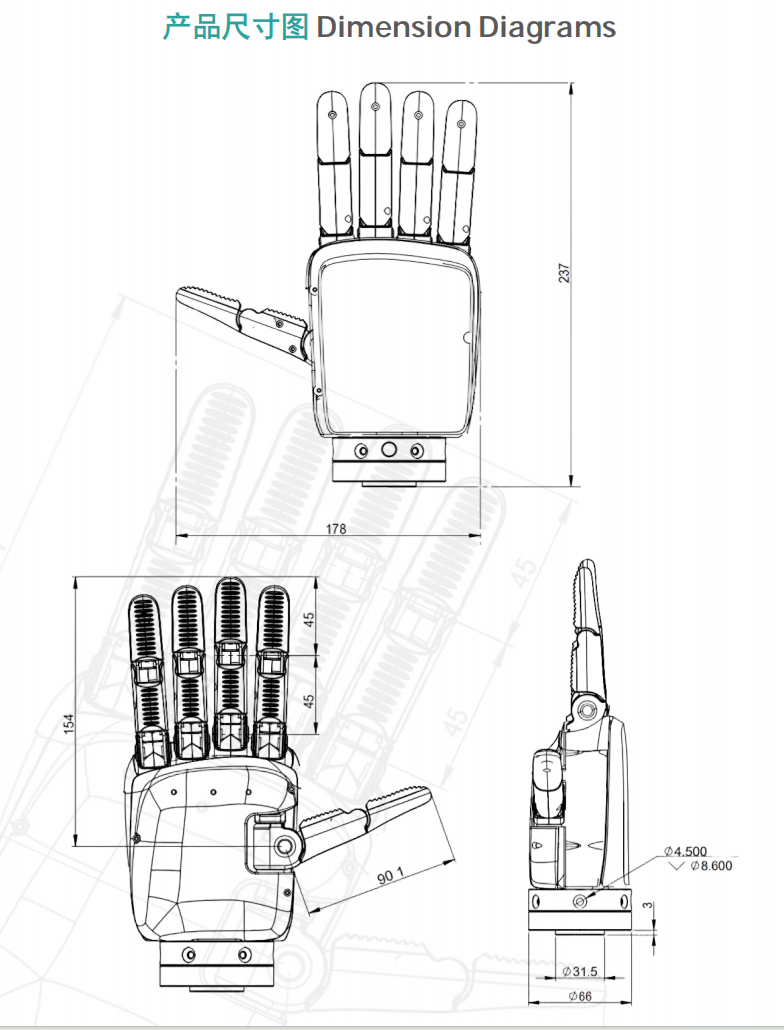
尺寸规格
获取产品
如需了解产品报价或技术支持,请联系我们。